شبکه-عصبی-پرسپترون
ارزیابی عددی کاربرد شبکههای عصبی مصنوعی MLP در کنترل فعال سازهها
سازههایی با عملکرد بالا نیازمند محیطی عاری از ارتعاش و خطر تحریک هستند، لذا این قبیل سازهها نیازمند رویکرد ساخت و الزامات طرح جدیدی میباشند. این الزامات طرح علاقه به استفاده از سیستمهای کنترل فعال را ایجاد کرده است. سیستم کنترلی فعال وضعیت جاری سازه را کنترل میکند، تصمیم متناسب با وضعیت سازه را میگیرد و عمل مناسب را به سازه اعمال میکند. در این مقاله ارزیابی عددی کنترل فعال سازهای با شبکهی عصبی مصنوعی از نوع پرسپترون چند لایه (MLP) مورد بررسی قرار گرفته است. در پژوهش پیش رو کنترل فعال به صورت حلقه بسته با لحاظ پاسخ سازهای صورت میگیرد، بدین منظور یک سازهی پنج درجهی آزادی در نظر گرفته شده و آموزش شبکه با لحاظ زلزلههای منجیل، طبس و بم صورت گرفته و در نهایت، کارایی کنترل فعال با شبکه عصبی مصنوعی با سازههای بدون کنترل و کنترل غیر فعال مورد مقایسه و ارزیابی قرار گرفته است که نشان دهنده کارایی کنترل فعال با شبکههای عصبی مصنوعی میباشد.
سازههای مدرن نیازمند رویکرد ساخت و الزامات طراحی جدیدی هستند. مهندسین سازه تمایل به معرفی، توسعه و اجرای سازههای بلندتر، با مقاطع عرضی لاغر و دهانههای تکیهگاهی بلندتر دارند. این رویکرد سازهها را با مشکلات ناپایداری و تحریکات جدی روبرو میسازد. سازههایی همچون بیمارستانها، کارگاههای ابزار دقیق، آزمایشگاهها و غیره نیازمند محیطی عاری از ارتعاش و خطر تحریک هستند. ارضای این الزامات طرح، نیاز به سازههایی با عملکرد بالا دارد و علاقه به اجرای سیستمهای کنترل فعال را ایجاد کرده است. این نوع سیستم کنترلی وضعیت جاری سازه را کنترل میکند، تصمیم مناسب با وضعیت سازه را اتخاذ میکند و عمل مناسب را به سازه اعمال میکند. مکانیزم تصمیم (کنترل کننده) میتواند براساس الگوریتمهای تجویزی و یا متدولوژیهای غیر الگوریتمی مانند سیستمهای فازی و یا شبکههای عصبی مصنوعی باشد.
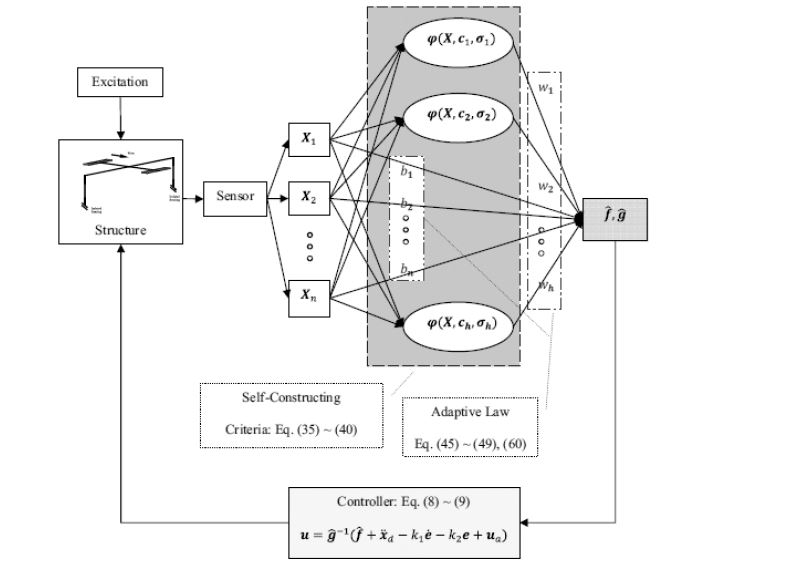
در پژوهش پیشرو قابلیت عملکرد یک سیستم کنترل فعال که از یک شبکه عصبی مصنوعی به عنوان سیستم تصمیم گیرنده بهره میگیرد، بررسی میشود. اولین مرحله از فرایند کنترل شامل پایش وضعیت سازه و محیط است. این اطلاعات به کنترل کننده انتقال مییابند تا در صورت لزوم عمل مناسب را برای تصحیح وضعیت سازه به درجات آزادی اعمال کند. اطلاعات جمعآوری شده در مرحله اول کنترل کننده را قادر میسازد تا عملکرد خود را بخصوص با وضعیتهای مختلف جاری سازه تطبیق دهد.
ﺷﺒﮑﻪﻫﺎی ﻋﺼﺒﯽ ﻣﺼﻨﻮﻋﯽ ﮐﻪ اﻣﺮوزه در مسائل ﻓﺮاواﻧﯽ ارزش ﺑـﺎﻻی ﺧـﻮد را ﻧﺸـﺎن دادهاﻧـﺪ، ﺑـﺮ اﺳﺎس ﻣﺪل ﺑﯿﻮﻟﻮژﯾﮏ ﻣﻐﺰ اﻧﺴﺎن ﺑﻪ وﺟﻮد آﻣـﺪهاﻧـﺪ. ﻣﻔﻬـﻮم ﺷـﺒﮑﻪ ﻋﺼـﺒﯽ ﻣﺼـﻨﻮﻋﯽ ﮐـﻪ در واﻗـﻊ یکی از ﻣﻬﻤﺘﺮﯾﻦ زﯾﺮﺷﺎﺧﻪﻫﺎی ﻫﻮش ﻣﺼﻨﻮﻋﯽ اﺳﺖ، در واﻗﻊ ﻧﻤﻮﻧﻪ ﺑﺮداری ﺳﺎدهای از ﺳﯿﺴﺘﻢ ﻋﺼـﺒﯽ اﻧﺴـﺎن اﺳـﺖ ﮐﻪ در ﻗﺎﻟﺐ ﯾﮏ ﻣﺪل رﯾﺎﺿﯽ ﻣﺘﺒﻠﻮر ﺷﺪه اﺳﺖ. شبکههای ﻋﺼﺒﯽ ﻣﺼﻨﻮﻋﯽ دارای ویژگیهایی ﻣـﯽﺑﺎﺷـﻨﺪ ﮐـﻪ آنها را در ﺑﺮﺧﯽ ازﮐﺎرﺑﺮدﻫﺎ ﻣﺎﻧﻨﺪ ﺗﺨﻤﯿﻦ ﺗﻮاﺑﻊ، ﭘﯿﺶ ﺑﯿﻨﯽ، ﺗﺸﺨﯿﺺ اﻟﮕﻮ، ﮐﻨﺘﺮل، رﺑﺎﺗﯿﮏ و ﺑـﻪ ﻃـﻮر کلی در ﻫﺮﺟﺎ ﮐﻪ ﻧﯿﺎز ﺑﻪ ﯾﺎدﮔﯿﺮی ﯾﮏ ﻧﮕﺎﺷﺖ ﺧﻄﯽ و ﯾﺎ ﻏﯿﺮ ﺧﻄﯽ ﺑﺎﺷﺪ، متمایز مینماید. از ﺟﻤﻠﻪ اﯾﻦ ویژگیها، ﻣﯽﺗﻮان ﺑﻪ ﻗﺎﺑﻠﯿﺖ ﯾﺎدﮔﯿﺮی، ﻗﺎﺑﻠﯿﺖ ﺗﻌﻤﯿﻢ و ﭘﺮدازش ﻣﻮازی اﺷﺎره ﻧﻤﻮد. ﺗﻨﻮع مدلهای ﺷـﺒﮑﻪﻫـﺎی ﻋﺼﺒﯽ و الگوریتم های ﯾﺎدﮔﯿﺮی آنها، اﻣﮑﺎن ﮐﺎرﺑﺮدﻫﺎی ﻣﺨﺘﻠﻔﯽ را ﺑﺮای آنها ﻓﺮاﻫﻢ ﻣﯽسازد.
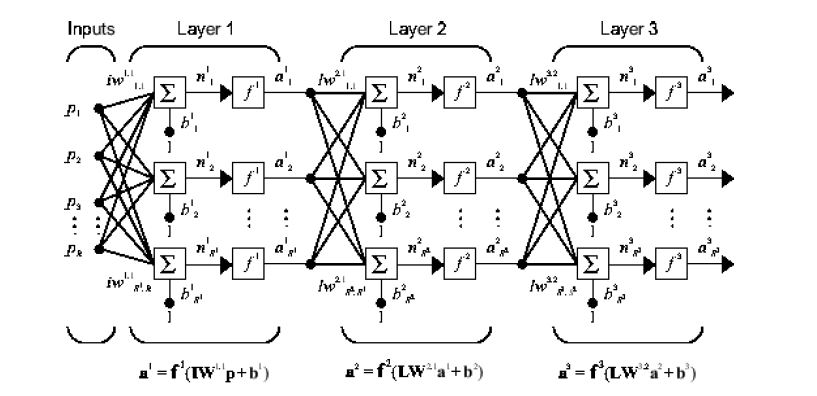
شبکههای پرسپترون چند لایه
در شبکههای چند لایه، لایهها به ترتیب به هم متصل میشوند به صورتی که خروجیهای لایه اول، ورودیهای لایه دوم و به همین ترتیب تا آخر که خروجیهای لایه آخر خروجیهای اصلی و پاسخ واقعی شبکه را تشکیل میدهند.
مدل سازی
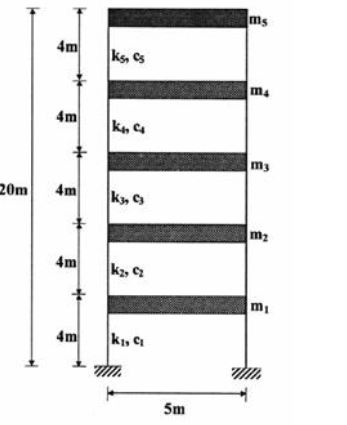
گام اول مدلسازی انتخاب پارامترهای سازهای و نوع سیستم کنترلی مورد استفاده در مدلسازی است. با تحریک دینامیکی، سازه در گام تحریک را درک کرده و به آن پاسخ میدهد. پاسخ سازه شامل (تغییرمکان، سرعت و یا شتاب) محل درجه آزادی که تجهیزات الحاقی اعمال نیرو بدان نصب شده است، میباشد. کنترل کننده که در اینجا یک بستهی پردازندهی شبکهی عصبی مصنوعی است، پاسخ سازه را میخواند و متناظر با آن نیروی فعال را به سازه اعمال میکند و سازه در گام تحت تحریک دینامیکی و نیروی فعال آنالیز میشود. این حلقه تا زمانی ادامه دارد که تحریک دینامیکی بر سازه وارد میشود. در شکل زیر مشخصات هندسی سازه ی 5 درجهی آزادی مورد بررسی در این پژوهش را مشاهده میکنید.
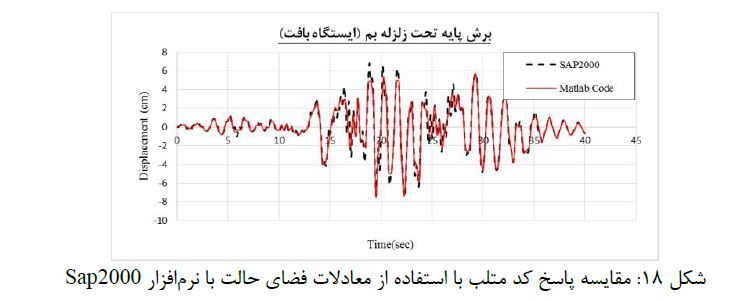
صحت سنجی:
بدین منظور قاب یک طبقه ی زیر انتخاب شده است. پارامترهای جرم، سختی و نسبت میرایی برای این قاب بترتیب برابر 1539 kg.s2/cm، 20 kg/cm و 0.05 است. این سازه تحت رکورد شتاب نگاشت زلزله بم، ایستگاه بافت با گامهای زمانی 0.01 قرار گرفت. حل معادله تعادل دینامیکی سازهی فوق با استفاده از معادلات فضای حالت حل شده است. شکل (18) مقایسه پاسخ جابجایی را نشان میدهد.
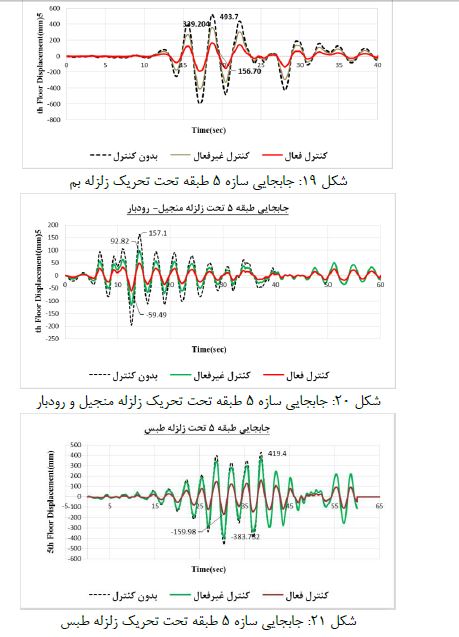
در شکلهای زیر با مقایسه مقادیر حداکثر جابجایی دینامیکی میتوان به این نتیجه رسید که سیستم شبکه عصبی مصنوعی در تقریب نیروی اعمالی کنترلی به سازه از کارایی بالایی برخوردار است.
قاب 5 طبقه با مشخصات سازهای ذکر شده تحت تحریک نزدیک 40 ثانیهای زلزله بم، حداکثر جابجایی 493.70mm را تجربه کرده است. این سازه با الحاق سیستم کنترلی غیر فعال متحمل حداکثر جابجایی 329.90mm بوده است. در گام نهایی با اعمال نیروی کنترلی فعال مخالف با جهت ارتعاش، مقدار جابجایی این سازه 156.70mm است.
در خصوص زلزله منجیل و رودبار نیز که مدت زمان ارتعاش آن حدود 55 ثانیه است، قاب 5 طبقه بدون سیستم کنترلی حداکثر جابجایی 157.1mm را تجربه کرده است. این سازه با الحاق سیستم کنترلی غیر فعال، متحمل حداکثر جابجایی 92.82mm بوده است. در گام نهایی با اعمال نیروی کنترلی فعال مخالف با جهت ارتعاش، مقدار جابجایی این سازه 59.49mm است.
تحت تحریک حدود 64 ثانیهای طبس نیز قاب 5 طبقه بصورت بدون کنترل، کنترل غیرفعال و کنترل فعال بترتیب حداکثر جابجایی 419.40mm، 383.75mm و 159.98mm را تجربه کرده است.
این مقاله به همت آقایان سید رضا الیاسی، وحید شمسی و پرویز احدی تهیه شده است
آب بندی استخر: راهنمای اجرایی و گام به گام صفر آب بندی استخر، یکی از…
عایق رطوبتی پیشساخته چیست؟ عایق رطوبتی پیشساخته، نوعی پوشش ضدآب است که بهصورت صنعتی تولید…
ملات ضد اسید فوران چیست؟ ملات ضد اسید فوران، یکی از پرکاربردترین انواع ملات ضد…
عایق رطوبتی در سوله چیست و چرا استفاده از آن ضروری است؟ عایق رطوبتی سوله…
مسلح کردن دیوار با شبکه الیاف؛ از ابهامات تا ممنوعیت مسلح کردن دیوار با شبکه…
اهمیت عایقکاری نما در حفظ ارزش ساختمان عایقکاری نما نهتنها از ساختمان در برابر آسیبهای…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}